Cálculo de un eje servocontrolado
Riesgos de un mal cálculo
Riesgos de un mal cálculo
Seleccionar mal los componentes de tu servosistema y servomecanismo puede significar el fracaso de todo el proceso de automatización.
En la mayoría de los casos, el equipo de integración detectará la falla de selección hasta el momento de arrancar la máquina, cuando la corrección implicará cambiar los componentes, largos tiempos de entrega y pérdida económica irreparable.
Una mala selección puede llevar a las
siguientes consecuencias
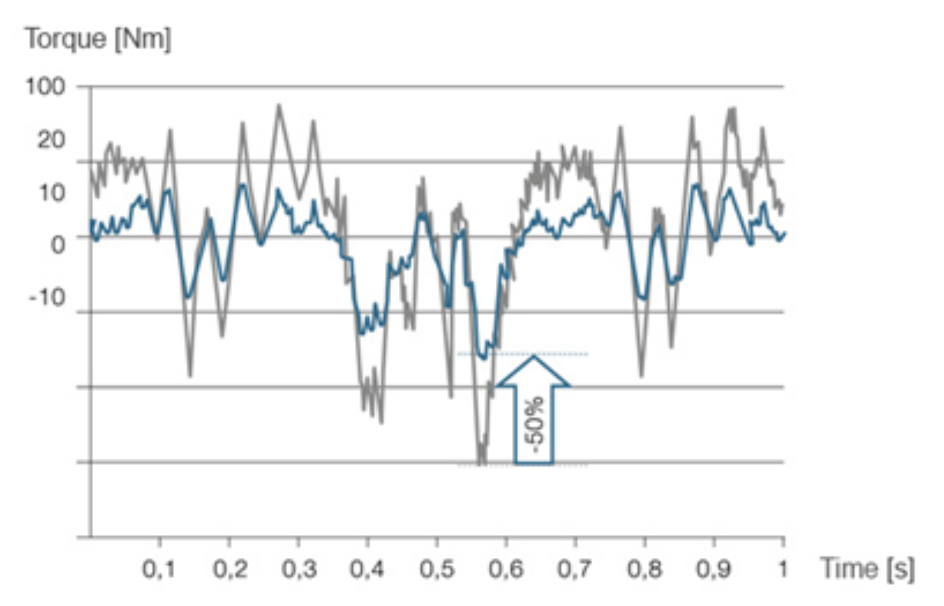
Los servomotores para aplicaciones de control de movimiento, a diferencia de un motor de corriente alterna o directa convencional, desempeñan diferentes valores de torque durante un ciclo completo. Esta característica en las aplicaciones de control de movimiento puede llegar a ser un problema para la persona encargada de dimensionar el servomotor.
Omitir variables como regeneración de energía, tiempos de paro de emergencia, indicadores térmicos, torque picos y RMS es un error frecuente al seleccionar empíricamente un servomotor.
Existen mecanismos de diferentes gamas dentro de la industria; a diferencia de lo que se cree, la capacidad de transmitir fuerza o torque suele estar deslindada de la calidad o especificidad del mecanismo. Cuando nos encontramos en la labor de definir componentes para una aplicación de control de movimiento, existen variables que a veces no tomamos en cuenta para identificar si el mecanismo o componente es adecuado para un sistema servo. Algunas de tales variables son el juego mecánico, la inercia, la capacidad de torque a la entrada, la velocidad crítica de operación, la desalineación máxima, el balanceo, entre otras.

En una aplicación de control de movimiento, en la cual el servomotor desempeñará diferentes valores de torque en un ciclo de trabajo, es crucial determinar el valor de torque equivalente (o torque RMS) para estimar las variables térmicas correspondientes; tales variables son el indicador térmico S1, los factores de reducción de torque nominal por temperatura o por pérdida en la capacidad de disipación, el factor de sobrecarga, el porcentaje de utilización de la velocidad continua, entre otras.
Estas variables afectan directamente la capacidad que tendrá el servomotor para enfriarse en determinada aplicación bajo condiciones específicas de operación.
La relación de inercias es un indicador numérico que involucra el momento de inercia total de la aplicación en relación con la inercia del servomotor. Para muchos fabricantes de maquinaria, esta es la variable más importante al dimensionar un servomotor. De no ser considerada puede generar severas consecuencias; una de las más comunes es la imposibilidad de sintonizar el servomotor con la carga o, incluso, la incapacidad para controlar el sistema de manera óptima.
El servomotor, en muy pocas ocasiones, va a estar acoplado directamente a la carga que se desea posicionar. El funcionamiento deseado de la aplicación se llevará a cabo mediante diferentes transformaciones mecánicas que, en la mayoría de los casos, suelen afectar directamente los requerimientos de velocidad.
A veces es complicado interpretar o abstraer cuál es el requerimiento real de velocidad a la salida del servomotor. Elementos mecánicos como trenes de engranes, poleas o rodillos, tornillos de bolas, planetarios o maquinados, cigüeñales, levas, mecanismos excéntricos e, incluso, escalamientos poco comunes en el drive o PLC suelen representar diferentes etapas de reducción que afectan directamente la velocidad de la carga o, lo que es igual, la velocidad a la que debería moverse el servomotor para obtener el perfil de movimiento deseado.

Las aplicaciones de control de movimiento, en su mayoría, suelen tener un comportamiento complejo en lo que se refiere al posicionamiento de la carga. Esto es traducido al servomotor como un perfil de movimiento dinámico. Con esto, no nos referimos a una aplicación de alta velocidad (aunque podría ser así), sino a una aplicación con cambios de velocidad presentes.
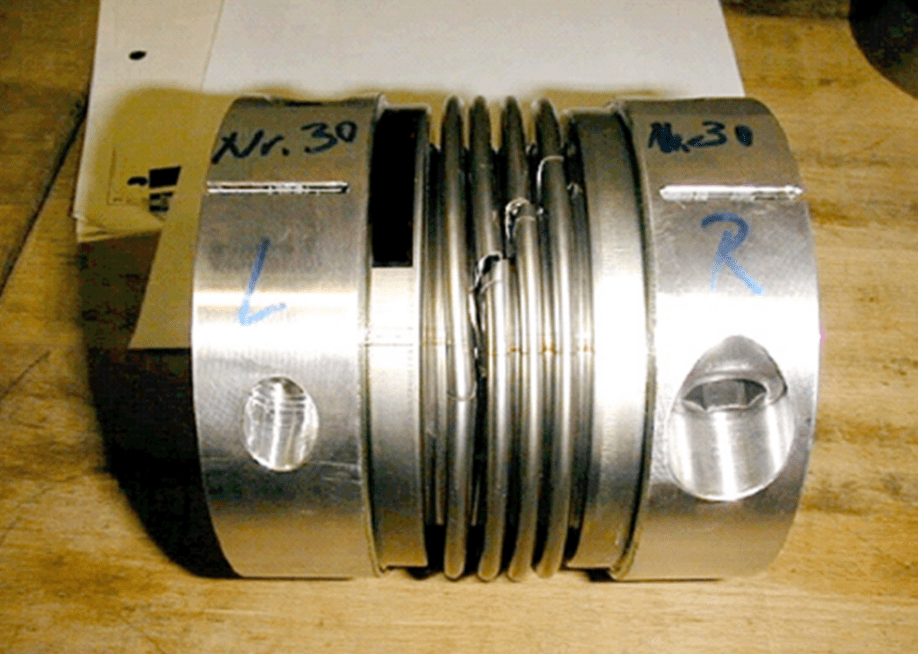
Este comportamiento (sumado a errores de instalación, desalineación, torques excesivos de apriete, entre otros) puede ocasionar un alto nivel de fatiga, lo que también puede causar falla, ruptura o daño permanente en flechas, acoplamientos y elementos de conducción en general.

Los servomotores, bajo ciertas condiciones de operación, pueden comportarse como un generador de energía y no como una carga; esto se debe al arreglo que existe entre el embobinado y los imanes permanentes del servomotor. Este fenómeno no suele ser tomado en cuenta en la mayoría de las selecciones empíricas; la consecuencia más grave son las fallas en el drive por alta regeneración.
Un escenario común al dimensionar una aplicación servocontrolada existente o en etapa de diseño consiste en carecer del espacio suficiente para agregar un reductor al sistema. La importancia de un reductor de velocidad en un sistema servo es crucial para obtener una excelente relación de inercia, utilizar servomotores y drives más pequeños e, incluso, agregar cierto grado de robustez a la máquina.
En muchos de los casos, el espacio que un reductor necesita para su montaje o las dimensiones del conjunto servomotor-reductor suelen subestimarse u obviarse. En tal caso, es necesario recurrir a equipos de gama alta con una mayor densidad de potencia mecánica (más torque en menor espacio) o a configuraciones de montaje diferentes a un arreglo en línea.
En las aplicaciones de control de movimiento, las variables de relación de inercias y de comportamiento térmico suelen definir o influir considerablemente en la selección final del servomotor. Por lo tanto, es muy probable que, en determinada aplicación servocontrolada, la capacidad de torque pico del servomotor sea mayor a la que necesita la aplicación; dicho de otra forma, el servomotor proporciona más torque de lo que soportan algunos elementos mecánicos del sistema (por ejemplo, reductores, acoplamientos, flechas, poleas, actuadores, entre otros).
Lo anterior se debe a que se llegó a este supuesto tamaño de motor sin tomar en cuenta su capacidad de torque; en tal caso, es posible limitar a través del drive el porcentaje de corriente con el que trabajará el servomotor y, de esta manera, evitar fallas en el tren de componentes del sistema.
Reduce el riesgo de una selección empírica o basada en conceptos erróneos y garantiza el funcionamiento de los equipos seleccionados.
Conoce más sobre nuestra
experiencia y proceso de
cálculo.
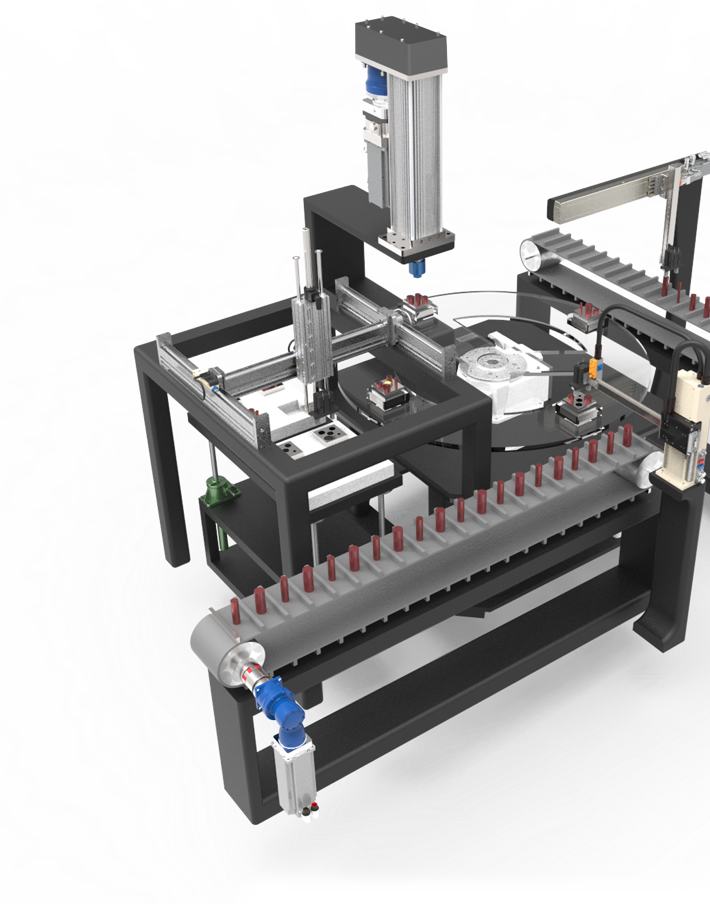


Plato de Indexado
Esta aplicación requiere un cálculo de inercia meticuloso. La distribución y excentricidad de cada uno de los elementos en el plato son factores importantes para determinar los componentes de torque. Suelen ser aplicaciones de mediana o alta inercia y, por consiguiente, tienen altos radios de reducción.

Bobinadora Central
Un eje de embobinado es ideal para ser servocontrolado. El incremento del diámetro de la bobina demanda cambios en la velocidad del sistema. Por lo tanto, una de las variables claves para dimensionar el servomotor adecuado es el perfil de movimiento de eje (velocidad máxima, aceleración y desaceleración).

Rodillo de Alimentación
Un alimentador servocontrolado permite suministrar sin contratiempos el material de manera continua. Variables como la fuerza de rozamiento y fuerza de contacto son consideradas para dimensionar correctamente el servomotor.

Banda transportadora
Contar con bandas transportadoras o conveyors servocontrolados es importante cuando la aplicación requiere indexados definidos, posicionamientos variables o variaciones de velocidad. La fuerza de tensión en la banda tiene un protagonismo importante para poder transmitir el torque proporcionado por el servomotor de forma correcta al mecanismo.

Sistema Piñón y Cremallera
Este es uno de los mecanismos más utilizados en los sistemas servocontrolados. Nos permite obtener una excelente precisión, desplazar grandes cargas, lograr aceleraciones y velocidad altas, así como ser económicamente imbatible en carreras largas. El análisis de las fuerzas radiales producidas por las rampas de aceleración y el cálculo de precisión para el posicionamiento son algunos de los aspectos que no se pueden omitir en sistemas de este tipo.

Corona Dentada
Independientemente de la ubicación de los dientes (dentro o fuera de la corona), es importante considerar el factor de corrección y la dirección del dentado para el correcto dimensionamiento del conjunto piñón, reductor y servomotor.

Tornillo de bolas, planetario o maquinado
En este mecanismo, son muchas las variables que se deben calcular para seleccionar tanto el servomotor como el tornillo. Las más importantes para el mecanismo suelen ser: velocidad crítica y tiempo de vida del tornillo; torque y velocidad máxima a la entrada; diámetro mínimo para evitar deflexión y paso.

Ejes Excéntricos (Levas, cigüeñales)
Los ejes servocontrolados de este tipo suelen ser un reto importante para el dimensionamiento y la selección del servomotor. La combinación de una operación continua y alta velocidad son factores que determinan las características de los equipos propuestos. El radio excéntrico de la leva y la compensación u offset del mecanismo son variables determinantes para esta clase de aplicaciones.

Aplicación rotativa vertical con masa excéntrica.
En estas aplicaciones se realizan análisis profundos y detallados sobre el uso de contrapesos para disminuir la excentricidad, el cálculo de distancias de frenado en condiciones de tiempo del paro de emergencia que garantiza la seguridad de los operarios y las capacidades de rodamientos para cargas en cantiléver.

Eje telescópico
El análisis de esta aplicación depende del tipo de transformación mecánica que permite el comportamiento telescópico. Estas suelen ser un sistema piñón-cremallera, un tornillo de bolas o un sistema de poleas. La masa móvil del eje telescópico y el diámetro de las poleas tensoras son cruciales para la correcta selección del conjunto servorreductor.

Cálculo de Optimización o Ingeniería Inversa
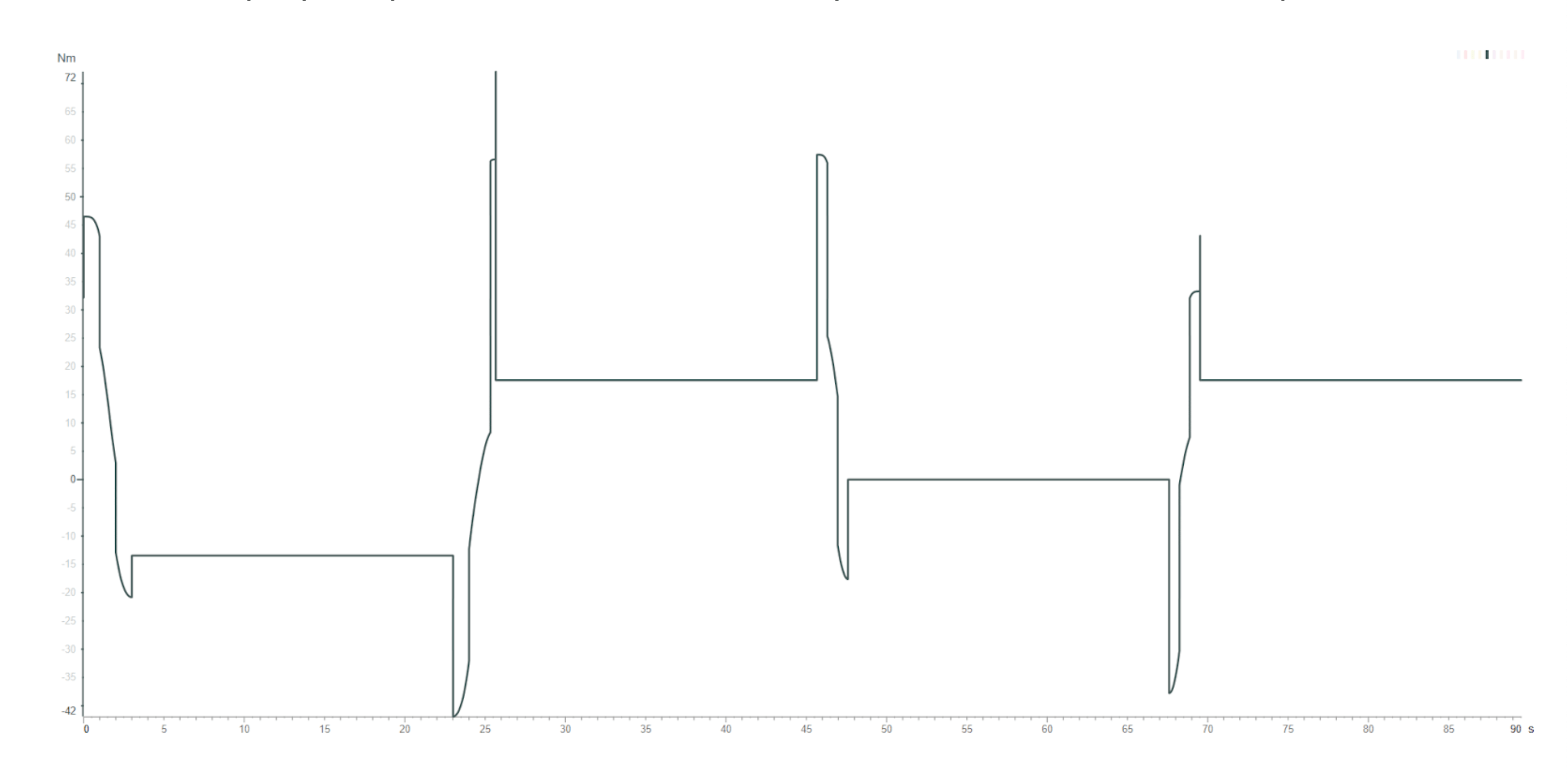
El análisis de un servomotor instalado en una máquina existente se realiza mediante una simulación generada a partir de sus gráficas de posición, velocidad y corriente.
Este proceso nos permite conocer los niveles de utilización reales del eje servocontrolado, optimizar la selección de componentes, identificar problemas mecánicos o de sintonización, conocer el factor de seguridad con el que cuentan los equipos involucrados y tener la oportunidad de mejorar y optimizar el performance de los dispositivos mecánicos vinculados al servomotor. Este proceso es ideal para prototipos, máquinas fabricadas en línea, migraciones o actualizaciones de tecnología o componentes.
Nuestro servicio de ingeniería inversa nos permite realizar una optimización a partir de condiciones reales de operación y así proporcionar beneficios tangibles en el desempeño de los equipos, reducción de costos a partir de un análisis documentado e incrementar la confianza de las soluciones proporcionadas por nuestros clientes.
Elementos mecánicos adicionales
Todas las aplicaciones servocontroladas cuentan con elementos adicionales necesarios para el
correcto funcionamiento de un mecanismo. Algunos de estos componentes pueden ser:
Es necesario calcular las variables que determinen el correcto funcionamiento de dichos
componentes para garantizar el éxito del conjunto. Algunas de ellas son:

En la compra de los componentes sugeridos,
se absorbe el costo del cálculo de los componentes.
COTIZA AHORA
