Los sistemas de control están basados en los principios de los sistemas lineales; por lo tanto, sus características son la estabilidad y la eficiencia. Los sistemas de control son capaces de administrar y dar instrucciones precisas para el funcionamiento de otros sistemas; con ello, pueden sustituir algunas actividades humanas de manera eficiente, óptima y con la garantía de minimizar errores en los procesos, así como de mejorar resultados.
Específicamente, los sistemas de lazo cerrado integran componentes que comparan un valor deseado contra el obtenido al final del proceso. Por lo tanto, el funcionamiento de estos sistemas consiste en alimentar un controlador con la señal del movimiento esperado. Este tipo de sistema utiliza una medida de la salida real y la compara con la señal del movimiento deseado (posición comandada); la diferencia entre la posición comandada y la real es conocida como error. Para disminuir este error, la lectura de salida se usa como retroalimentación.
Te interesa leer el blog “Sistemas de control”
Con base en lo anterior, los sistemas de control de movimiento electrónico requieren interfaces de comunicación confiables para intercambiar información entre los controladores, actuadores y sensores. En ese sentido, en el corazón de cualquier sistema de control de movimiento electrónico se encuentran las interfaces de comunicación, las cuales intercambian información entre sus componentes. Por ello, en este blog te compartiremos la explicación del director del Desarrollo de Tecnología de Posital Fraba, Christian Fell, acerca de la conectividad de los sensores absolutos.
¿Qué son los encoders?
Los encoders son dispositivos de detección que brindan una respuesta o retroalimentación; para ello, convierten el movimiento en una señal eléctrica, así que son ampliamente utilizados para determinar posición, velocidad o dirección. En cuanto a la forma en que un encoder registra la posición, este puede ser incremental o absoluto.
Los encoders incrementales emiten un flujo continuo de pulsos como señal; un pulso por cada vez que el eje del codificador gira en un ángulo pequeño definido. La resolución de un codificador es conocido como el número de pulsos por revolución (PPR). Este tipo de codificador es ideal para aplicaciones que requieren control de velocidad, pues el controlador puede determinar la velocidad de rotación de manera rápida y precisa a partir del intervalo de tiempo que existe entre los pulsos. Los encoders incrementales también pueden determinar la posición absoluta (ángulo de rotación), pero esto implica una carga adicional para el controlador, ya que debe mantener un recuento de los pulsos que recibe.
La conexión entre un codificador incremental y su controlador debe ser directa (de punto a punto) y, usualmente, se basa en una señal diferencial transmitida por cableado de par trenzado. En estos casos, los controladores de salida de los codificadores deben ser compatibles con la interfaz del controlador. Es pertinente aclarar que, la mayoría de las conexiones de controlador/codificador incremental utilizan controladores de salida Push-Pull (HTL) o RS422 (TTL), estos especifican los niveles de voltaje de la señal.
Por su parte, los sensores de posición, tales como los encoders absolutos e inclinómetros, funcionan mediante el envío de una palabra digital a manera de “telegrama" que notifica la posición medida en un instante específico. El sensor absoluto puede ser conectado mediante diversos tipos de sistemas de cableado, incluidos cables punto a punto (SSI, BiSS, Bit-Parallel o Analog), diseños de bus de acceso compartido (CAN, Profibus) y soluciones a gran escala de Ethernet industrial (EtherNetIP, ProfiNET, EtherCAT).

Conexiones para encoders
Las interfaces analógicas (voltaje o corriente) pueden ser rentables para sistemas de control simples, debido a que estos utilizan cableado punto a punto y son fáciles de implementar para redes pequeñas (de 1 a 5 sensores). Estas interfaces pueden emplear sensores digitales basados en microcontroladores sofisticados. Las instalaciones analógicas son comunes en vehículos y equipos médicos, por ejemplo.
Conoce los encoders analógicos de Posital Fraba disponibles en nuestro stock.
Los codificadores digitales e inclinómetros están disponibles con convertidores D/A escalables; estos se pueden programar para que el rango de salida eléctrica del sistema completo (como 0 a 5 V, 0 a 24 mA) se pueda configurar y, así, abarcar un rango predeterminado de movimiento mecánico (desde una fracción de vuelta hasta cientos de revoluciones). Esto mejora la precisión y la resolución sobre el rango de movimiento más significativo.
Interfaz analógica para sistemas simples
Las comunicaciones de bits en paralelo pueden generar comunicaciones de alta velocidad en distancias cortas mediante un cable dedicado. Sin embargo, en dicho caso, la resolución del sistema se ve limitada por el número de conductores en el cable. Por el contrario, las conexiones de interfaz síncrona en serie (SSI) y síncrona en serie bidireccional (BiSS) utilizan señales digitales e interactúan directamente con los controladores lógicos programables (PLC) u otros controladores digitales.
Las conexiones SSI ofrecen buena velocidad (frecuencias de reloj de hasta 2 Mhz), alta resolución, cableado flexible y comunicación confiable en distancias superiores a unos cientos de metros (las distancias más largas dictan velocidades de transmisión más bajas). El protocolo SSI facilita la detección básica de errores (cable roto, cortocircuito y consistencia de datos). BiSS, por su lado, es una versión avanzada de las conexiones SSI y, como tal, admite la comunicación en tiempo real entre los dispositivos de control y los sensores o actuadores de los servomotores, robots y otros sistemas de automatización. Asimismo, también permite que el controlador establezca parámetros operativos en dispositivos esclavos. Tanto la comunicación SSI como la BiSS se basan en conexiones RS-422 punto a punto y ofrecen la posibilidad de conectar en cadena varios dispositivos con el fin de eficientar los diseños de cables.
Conoce los encoders SSI de Posital Fraba disponibles en nuestro stock.
Otra alternativa, en cuanto a protocolos de comunicación serie estándar y que permite el intercambio bidireccional de datos entre los sensores y los dispositivos, es IO-Link. Christian Fell se refiere a este como un sistema de comunicaciones de bajo costo y fácil de implementar, pues es diseñado para simplificar las conexiones entre los sensores o actuadores simples que están ubicados en el piso de la fábrica y en redes de acceso múltiple más complejas (como bus de campo o Ethernet industrial). La puerta de enlace maestra IO-Link tiene, en uno de sus lados, múltiples conexiones punto a punto para sensores individuales; el otro lado, tiene una interfaz a la red de acceso compartido de toda la planta. La interfaz IO-Link para dispositivos finales es simple, por lo que, elimina la necesidad de admitir protocolos de comunicación complejos a nivel de sensor/actuador. IO-Link admite una variedad de tipos de datos (por ejemplo, datos de medición, instrucciones de configuración del dispositivo y temperatura).
Bus de campo para control de movimiento
Las redes de bus de campo fueron desarrolladas para vehículos, celdas de trabajo y sistemas de automatización de fábricas; por esa razón, sus aplicaciones abarcan transportadores e instalaciones de fabricación, equipos móviles, equipos médicos, turbinas eólicas y paneles solares. Estas redes se basan en una topología de bus con múltiples dispositivos que comparten una red troncal de cableado común (también conocido como backbone o cableado vertical). Asimismo, admiten herramientas de diagnóstico para ayudar con la configuración del sistema y la solución de problemas.
- El bus CAN (red de área del controlador) y Profibus (bus de campo de proceso) son protocolos de comunicación introducidos por Bosch y Siemens, respectivamente.
- La interfaz DeviceNet fue desarrollada por Allen-Bradley/Rockwell y es comúnmente utilizada en América del Norte; combina la capa física CAN con los protocolos de nivel superior CIP (protocolo industrial común).
En cualquiera de estos casos, los sistemas de bus de campo son rentables y su topología simplifica en gran medida el diseño del cableado al que se deben conectar múltiples sensores y actuadores; no obstante, también se debe considerar que la cantidad de dispositivos que cada bus admite para conexión está limitada por las propiedades eléctricas de la red.
Ethernet industrial
El Ethernet industrial utiliza la misma tecnología central que millones de redes LAN comerciales y domésticas instaladas en todo el mundo. Gracias a ello, los usuarios del sector industrial pueden aprovechar la enorme base de productos y la experiencia acumulada en torno a los estándares Ethernet (IEEE 802.x). Sin embargo, las condiciones en las fábricas suelen ser mucho más duras que las de un entorno de oficina. Las aplicaciones industriales necesitan que los controles funcionen en tiempo real y sin retrasos en la transmisión de datos (latencia), lo cual puede ocurrir con alguna red Ethernet ordinaria.
Como respuesta a lo anterior, los sistemas Ethernet industriales incorporan características especiales a nivel de hardware y software que están pensadas para mejorar la robustez y el rendimiento. En este caso, los ejemplos incluyen Profinet, EtherNet/IP y Ethernet Powerlink. El protocolo Ethernet industrial permite configurar redes más grandes y complejas en comparación con las tecnologías de bus de campo como DeviceNet. Dado que tiene el potencial para la integración vertical, este protocolo facilita establecer interfaces perfectas entre la red de fábrica (Ethernet industrial) y la red empresarial (Ethernet de oficina); así, hace posible integrar la producción, el control de inventario y los sistemas de gestión empresarial.

Comunicaciones inalámbricas
Las tecnologías inalámbricas permiten establecer comunicación con maquinaria móvil (como vehículos autónomos guiados) o equipos que deben ser reubicados con frecuencia. IEEE 802.11 Wi-Fi y Bluetooth son estándares ampliamente utilizados para comunicaciones inalámbricas de corto alcance, pero también hay otros estándares disponibles para comunicaciones de mayor alcance (aunque esto puede requerir tasas de bits más bajas). Las redes 5G emergentes, por ejemplo, prometen tasas elevadas de datos y baja latencia.
Es conveniente tener en cuenta que las comunicaciones inalámbricas pueden ser menos confiables que las conexiones por cable en entornos con mucho ruido eléctrico; de igual manera, pueden no ser adecuadas para señales de retroalimentación que dependen del tiempo. En el caso de un robot de almacén, por ejemplo, una señal inalámbrica puede ser utilizada para emitir una instrucción de alto nivel (recuperar el material A de la ubicación X). Sin embargo, los sensores para la dirección, el control de velocidad y la prevención de colisiones suelen estar conectados al sistema de control para garantizar una respuesta instantánea confiable.
En la siguiente tabla, puedes ver de forma resumida las conexiones disponibles para los encoders absolutos.
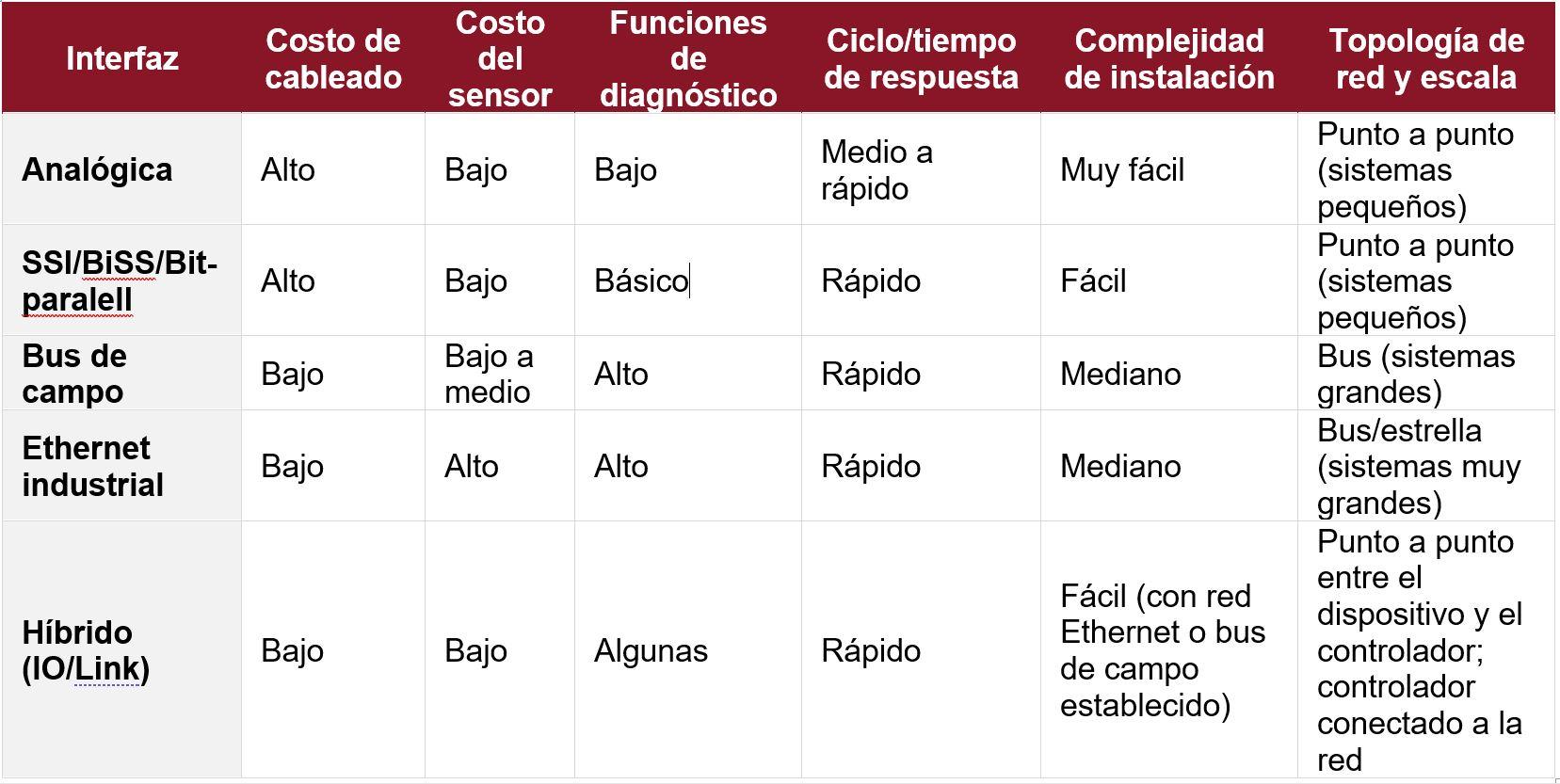
Tomado de “Getting connected: interface options for motion control”, Christian Fell.
Protocolos de código abierto (open source)
Los principales proveedores de tecnologías de redes industriales han respaldado el desarrollo de protocolos de redes e interfaces open source (proveedor neutral). Gracias a estos, los compradores de equipos de control de movimiento pueden mezclar y combinar componentes certificados por estándares de diferentes proveedores, sin afectar el funcionamiento óptimo del sistema. Este tipo de estándares independientes son importantes para los proveedores de equipos especializados, pues sus productos han sido diseñados para admitir una amplia variedad de interfaces de comunicaciones basadas en estándares internacionales.
En este sentido, las organizaciones de estándares de la industria incluyen:
- La Asociación de Proveedores de Dispositivos Abiertos (Open DeviceNet Vendor Association, ODVA), patrocinadores de los estándares DeviceNet y EtherNet/IP.
- La CAN en automatización (CAN in Automation Association, CiA), patrocinadores de los protocolos CANopen.
- La Organización Profibus (Profibus Nutzerorganisation, PNO), patrocinadores de las interfaces Profibus y Profinet.
Los encoders rotativos absolutos de Postial Fraba, basados en un sistema de medición magnético preciso y de alta resolución, están disponibles con interfaces para Ethernet industrial (EtherNet/IP, Profinet y Powerlink), DeviceNet, Profibus, Interbus, CANopen, SSI y Bit-Parallel. Estos dispositivos han sido certificados por ODVA (para redes EtherNet/IP), por PNO (Profibus y Profinet) y por CiA (CANopen).
URANY colabora de forma estrecha con Posital Fraba para poner a tu alcance su variedad de soluciones en medición. ¡Ponte en contacto con nosotros para acceder a todas las ventajas de la tecnología desarrollada por Posital Fraba!